M a r k C r o s b i e
| You are in: LEGO Differential Drive | Home Resume Linux LEGO Electronics Movies Mac OS X |
| Contents
Home
Resume
Linux
LEGO
Electronics
Movies
Mac OS X
Music
Details
Mark's LEGO
SHRIMP Robot
Tape Drive
Grabber Arm
Robot Chassis
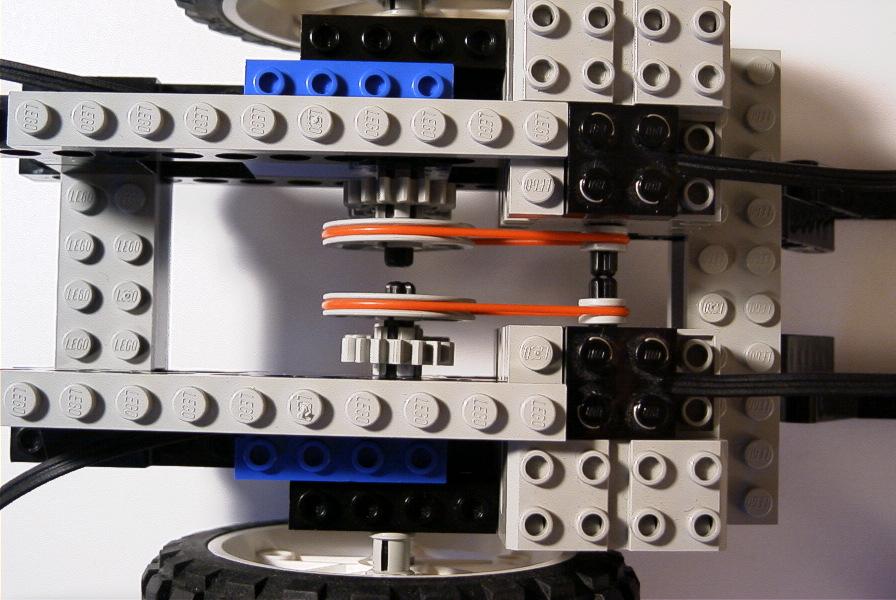
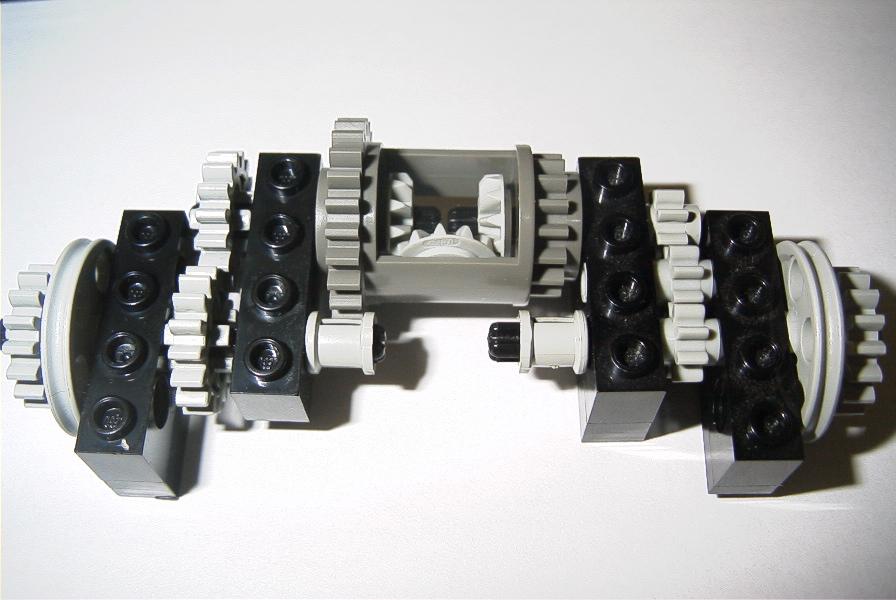
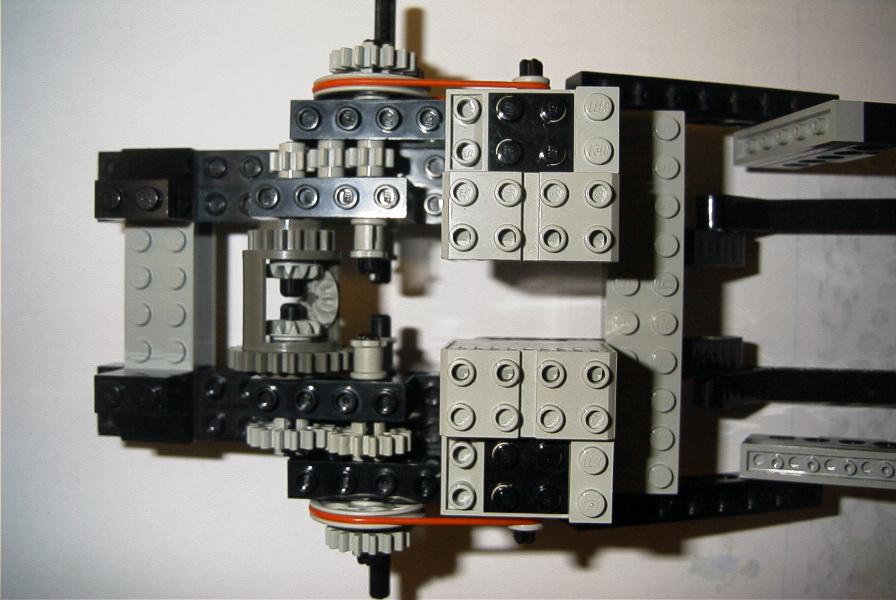
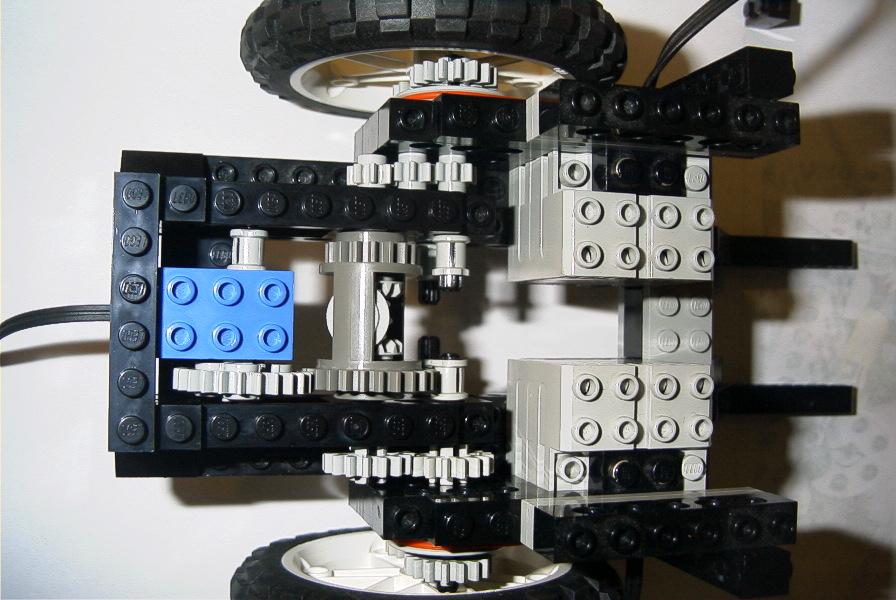
Differential Drive
BrickOS programming
Contact Mark at mark@mastincrosbie.com
|
|